





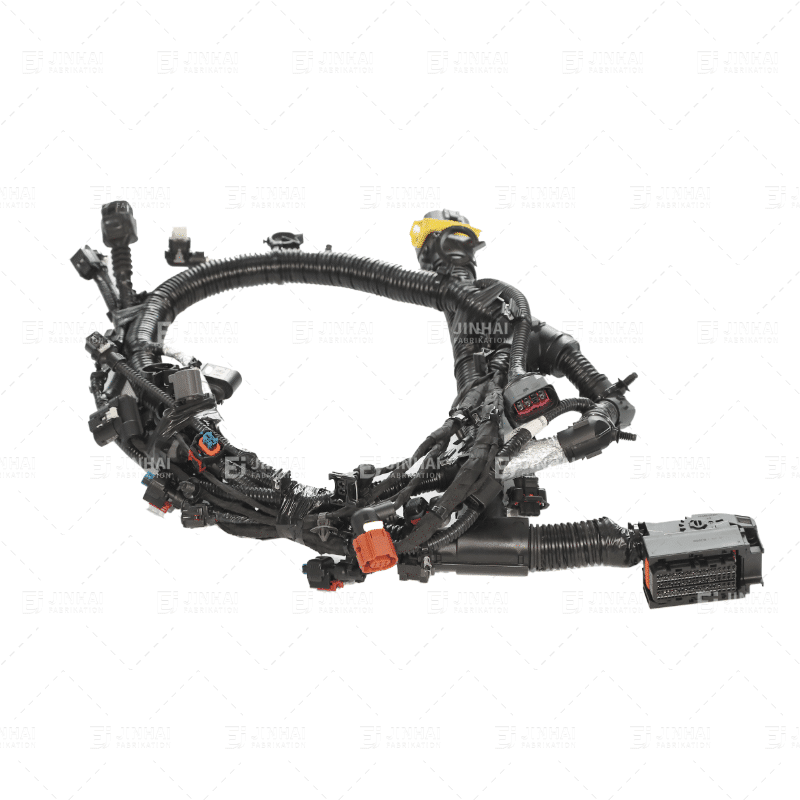










Tiêu chuẩn giao tiếp cho hệ thống dây điện động cơ ô tô
Tiêu chuẩn giao tiếp của hệ thống dây điện động cơ ô tô chủ yếu bao gồm hai giao thức: CAN (Mạng khu vực điều khiển) và LIN (Mạng kết nối cục bộ).
| PHiệu suất | LIN | CÓ THỂ |
| Quyền truy cập trung bình Kiểm soát | Chủ đề duy nhất | Nhiều Bậc Thầy |
| Tốc độ trung bình của xe buýt | 2,4 đến 19,6 kbd | 62,5 đến 500 kbd |
| Thông điệp đa phát Định tuyến | Mã định danh 6 bit | 11/29-bit định danh |
| Số lượng điển hình của Các nút | Từ 2 đến 10 nút | 4 đến 20 nút |
| Mã hóa | NRZ 8N1 (USART) | NRZ với Bit Stuffing |
| Dữ liệu byte trên mỗi khung hình | 2, 4, 8 byte | 0 đến 8 byte |
| Thời gian truyền tải cho 4 byte dữ liệu | 3,5 ms ở 20 kbd | 0.0,8 ms ở 125 kbd |
| Phát hiện lỗi | Kiểm tra tổng 8-bit | CRC 15 bit |
| Lớp vật lý | Dây đơn, Vbat | Dây đôi xoắn, 5V |
| Sinh ra đồng hồ | Thạc sĩ:Crystal,Nô lệ:RC/Resonathoặc | Crystal |
| Chi phí tương đối trên mỗi nút | 0.5 | 1 |
CAN và LIN phù hợp cho các tình huống khác nhau trong hệ thống dây dẫn trong khoang động cơ. CAN được sử dụng cho các hệ thống điều khiển động cơ chính có tốc độ cao và độ tin cậy cao, trong khi LIN được sử dụng cho các hệ thống phụ trợ của các mô-đun có yêu cầu thời gian thực thấp, chẳng hạn như hệ thống điều khiển thân xe (như cửa sổ và cần gạt nước).
Liên hệ với chúng tôi Liên hệ ngay với chúng tôi để tìm hiểu cách chúng tôi có thể đáp ứng các yêu cầu về cáp và dây dẫn của quý khách. Theo dõi chúng tôi trên YouTube. .






